
VSDs
 Understanding torque and speed control aspects of variable-speed drives is important, says Phil Kreveld.
Understanding torque and speed control aspects of variable-speed drives is important, says Phil Kreveld.
Variable-speed drive technology is continually being improved.
Although it is impracticable to provide a comprehensive review, the tabulation of drives included here should enable further investigation.
ADVERTISEMENT
The important aspects of drives can be summarised as follows:
- speed and torque control;
- modulation frequency; and
- programming and communication.
The tabulation of drives is based on low-voltage three-phase input/three-phase output designs. It includes a common range of specifications, such as kilowatts and speed range.
The drives listed are all voltage-controlled units – that is, the DC link uses capacitors for energy storage.
Current-controlled units use an inductor in the DC link to store energy.
An interesting feature of some designs is the ability to share a common DC bus for energy exchange between drives (one generating during a braking mode, the other using that energy).
Speed and torque control are very important for many applications. Almost invariably the connected load is a squirrel cage induction motor (more so for the limited ratings in the product comparison tabulation) so reference is made to its control.
Starting toque, jogging torque and hammer start features should be investigated with individual drive suppliers.
The theoretical maximum speed (synchronous speed) is determined by the stator frequency, and the number of pole pairs (n=60f/p) – where n is in revolutions per minute, f is frequency in Hz, and p is the number of pole pairs.
Torque is proportional to the synchronously rotating magnetic flux and the induced rotor current, ie: T=kφmIr – where k is a motor characteristic constant, φm is the flux and Ir is the rotor current.
The magnetic flux is proportional to the voltage (V) to frequency (f) ratio applied to the stator. Thus torque is also proportional to V/f
A common form of drive control is based on this ratio and is referred to as ‘scalar control’. The basis of this control technology is maintenance of the magnetic flux.
Scalar control is also termed steady-state control. It is well suited to applications not requiring rapid changes in speed and torque.
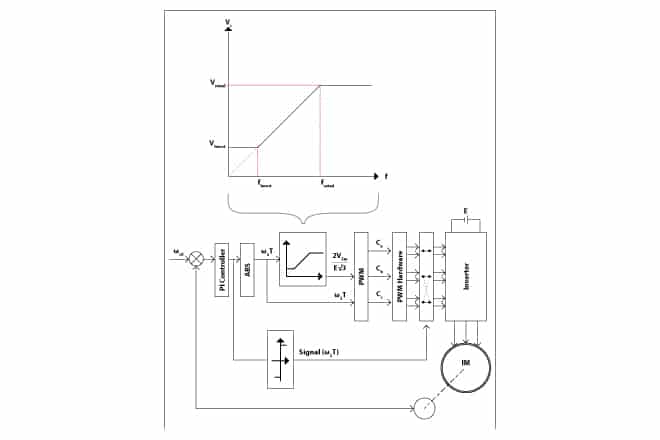
The accompanying diagram shows an idealised motor characteristic of power versus speed, and a block diagram of the control scheme. Other than for the very low speed range, where boosting torque is required, the linear slope of power versus speed is the control range where V/f (torque) is constant.
Note that the motor characteristic has power (not torque) as the vertical axis. Power equals torque x speed, thus the linear slope.
The principle of scalar motor control.
The control relies on measuring motor revs. Power demand increases, so does motor slip, and an error signal occurs when this is compared with the reference speed (frequency), causing the control circuit to restore torque by means of the required V/f ratio.
A more capable method is vector control (also called field orientation control, or FOC). It is used in applications where torque and speed need to be independently controlled and is therefore typically used for rapidly changing load conditions.
In principle the motor current is resolved into two vectors: one represents the magnetic flux, and the other the torque-producing current. Each of these can be adjusted separately and the control input can be sensor-based (closed loop) or sensorless (open loop). The latter relies on simulation of the rotor circuit.
For critical applications it is best to consult drive suppliers. In general, for other than low-speed applications, both control strategies are effective.
It is possible to run an induction motor without this feedback device, but very tight dynamic response is reduced. The vector control van provide a performance that is as good as that of a DC drive.
One way to visualise the essence of vector control is in terms of DC motor control, where the field current and armature current can be separately controlled to provide speed and torque control.
The control method for induction motors relies on mathematical transforms (Clarke and Park transformations), which convert motor current into two vectors (phasors) that rotate in synch with the rotor.
Not all drives use a form of feedback. Some units dedicated to service fans, for example, use a ‘squared torque’, which alters the V/f in accordance with motor torque being proportional to the square of revs (n) or frequency.
Some manufacturers refer to this control mode as (V/f)2. The power output is thus proportional to n3 and this corresponds to power requirements of pumps and fans.
Pulse width modulation frequency has a bearing on power loss in the inverter. There are no hard and fast rules but the higher the switching frequency, the higher the power loss is likely to be.
The comments we make here are of a general nature. Where efficiency (which has a bearing on ‘all of life’ energy cost) is of concern, individual drive suppliers should be consulted.
To avoid acoustic nuisance, frequencies above 15kHz are chosen for some drives. To provide some idea of power loss, an insulated-gate bipolar transistor (IGBT) switch in an inverter with the DC link voltage at 400V and a motor current of 15A will have a loss of 50W – that is, 300W for a six-element bridge.
Although not simply a feature of a variable-speed drive, the combination of inverter, drive cable and motor can result in insulation breakdowns, and common mode currents causing pitting of motor bearings.
The current drawn by the motor will look sinusoidal – but not the voltage which, by virtue of pulse width modulation, has very short rise and fall times. Voltage pulses travel the length of the drive cable and are partly reflected at the motor. Depending on the length of the cable, this can cause the voltage to be doubled, thereby affecting insulation.
Using a filter at the inverter output is recommended for many situations. This can also help reduce common mode current.
Braking methods for motors include phase reversal (plugging), DC injection and regenerative braking.
In the case of phase reversal, the motor has to be ‘caught’ as it is about pass through zero speed. This can be done in several ways, including tachometers or reverse-rotation detectors on the load or on the motor shaft, or shaft extension.
With phase reversal, a large braking torque is provided because the rotor suddenly has an effective slip of close to 2 the moment phase reversal takes place.
DC injection – available on many smaller variable-speed drives – is easy to arrange, as two ‘opposite legs’ of the inverter are maintained in the ON state to supply one of the motor windings. Effectively a slip of 1 occurs the moment DC is injected.
Both forms of braking are rotor dissipative. ‘Plugging’ in particular can cause overheating.
Resistive braking uses a resistor in the DC link and a chopper with variable duty cycle to provide a braking profile. Some manufacturers refer to this as the ‘7th IGBT’, on account of there being six in the inverter bridge.
Communication and programming vary widely among brands, sometimes complicating the integration of variable-speed drives in hierarchical control schemes.
At the more basic level, some drives are equipped with simple ladder logic features which permit their ready adaption in less complex plants.
Drive installations add to the harmonic load. Input filtering, which is offered by some suppliers, can reduce this.
Motor cable length considerations sometimes filters to be used.
The use of special RCDs is also recommended, as spurious tripping is one of the less desirable features of drive installations.
-
ADVERTISEMENT
-
ADVERTISEMENT
