
Don’t rush in
The tripping of high-efficiency motors on start-up needs a bit more than a simple solution. Phil Kreveld explains.

Figure 1
High-efficiency motors are one contribution to saving the planet.
Their use can save money by reducing electrical energy consumption per kilowatt of mechanical power output.
ADVERTISEMENT
Clever design has created motors in which maximum energy is transferred across the air gap between stator and rotor (we are mainly concerned here with induction motors).
Rotor electrical losses have been reduced as far as possible; windage and bearing losses have been shaved to the nth degree.
This is obviously a great thing, and many readers will be familiar with MEPS requirements for motors.
In Australia we are a little behind Europe, where MEPS has been replaced by ‘ie’ classifications. It started there with ie1, then ie2, is now ie3 and ie4 is about to happen. With each new step efficiency has been increased.
Of course, not all applications demand the use of high efficiency motors, but in the review of requirements in Table 1, you’ll see that most applications are captured in ie3.
The ie3 regulation affects all standard applications for
three-phase motors with the following criteria:
- two to six poles;
- rated voltage up to 1,000V;
- rated output power from 0.75kW to 375kW; and
- rated on the basis of continuous-duty operation.
The following motors are not affected
- motors designed for multiple speeds;
- motors that are completely integrated into a machine (pumps, fans, compressors);
- motors with integrated frequency converters (compact drives) if the motor cannot be tested separately from the converter;
- brake motors if the brake is an integral part of the internal design of the motor;
- specially designed submersible motors; and
- smoke extraction motors with a temperature class above 400°C.
The Standard is not enforced in Australia. However, that is not very important because most of our motors are imported and can be expected to accord with the higher efficiency of ie3.
So why devote an article to this? In short, because some things have to be taken into account for motor control.
The price paid for having a high-efficiency motor is that it draws an inconveniently high inrush current compared with lower-efficiency units.
The tacit assumption is that motors are started direct on line (DOL). So we are talking about lower-rating motors running at low voltage (LV) distribution level.
It is not a rare application area, and motors for a variety of tasks from air compressors, injection-moulding machines, bottling lines, pallet wrapping, CNC machines, many conveyor belts, etc, fall in into the 2kW or more range, and perhaps as high as 30kW.
When ie3 motors are employed in DOL mode, for example, unless the protection level is chosen wisely there is a chance that the protective device will be tripped on starting the motor. (It is assumed that the rated current of the motor falls somewhere within the protection range of he overload device.)
Suppliers of motor starter and protection control gear claim that, because of such tripping, higher-rating protective devices are chosen rather than devices based on the specifications.
This is not a smart way to deal with false tripping, because the higher-rating protective device will probably affect the tripping characteristics of the thermal overload. It is difficult to gauge how often this scenario plays out, but the engineering literature yields enough examples of starting problems to merit alerting our readers.
Figure 1 shows the familiar torque versus speed characteristic of a typical induction motor, and the current graph is superimposed.
The zero speed torque or locked rotor torque and current are high, in particular the current, which will be six or eight times the rated current flowing at rated speed.
It is often thought that the locked rotor current is in fact the inrush current, but that is not the case. When a motor is connected to supply, the first aspect is that the stator magnetic field has to be established.
The stator winding does not yet represent a sort of transformer with fairly substantial leakage inductance – everything is in ‘flux’ – until the magnetic flux is present in the air gap between stator and rotor.
During this time, which lasts less than one cycle but could stretch to several cycles, the current looks like a sine wave stuck on top of an exponentially decaying DC component (see Figure 2).
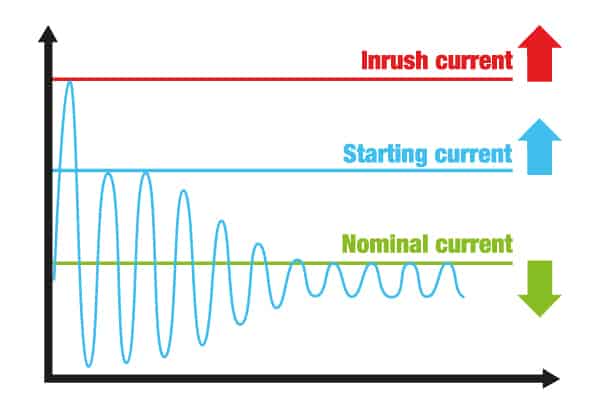
Figure 2
For your ‘common or garden’ induction motor of yesteryear, the inrush current (the current flowing before the locked rotor current level is reached) might typically be eight to 12 times rated current.
The ie3 motors have much higher inrush currents, lower locked rotor torque and, for the same kilowatt rating, a lower rated current.
This latter feature stands to reason, because kilowatts are equal to power factor multiplied by voltage and line current.
It is fair to assume that power factor is more or less the same for motors of low and high efficiency at rated speed and load, so line current must be lower.
Building high-efficiency motors in the first place involves reducing rotor resistance to reduce I2R losses. The magnetic design also has to be somewhat different, resulting in a different input resistance to reactance ratio at the stator terminals.
This all sounds scientific, but we can leave that – save to note that the higher resistance is relative to reactance the sooner the DC component decays.
However, for high-efficiency motors, resistance is lower and therefore the peak value of current and the decay time are higher.
As can be seen in Figure 3, the ratios of inrush current to rated current go up as we climb the efficiency scale. In fact, a level as high as 20 times rated current is not uncommon.

Figure 3
As stated, rated current is lower for high-efficiency motors. As you would expect, this accentuates the ratio of inrush to rated current.
So what are the implications for motor starter and protection gear?
Manufacturers with a European bent, so to speak, claim to have made accommodations in their designs.
At the protection level this is basically to provide a wider selection of rated current with a large degree of overlapping.
At the contactor level more attention is claimed to have been focused on contact design and physical layout.
The latter is important, as high currents can cause repulsion forces and chattering, with deleterious effects.
According to some manufacturers the thermal protection area (not usually considered a challenging area) is best served by electronic rather that the usual bi-metallic relays. It is hard to argue with this concept, as the use of I2–time algorithms is hard to beat in terms of repeatability and lack of memory effect.
The use of overlapping current ranges allows a designer to pick a range in which the rated current of the motor is in the lower quartile of the rated current range of the protection device – it being assumed that the ‘instantaneous’ trip is an integral part of the protection circuit.
It can also be provided by a moulded-case breaker. By picking the low end of the protection range, the maximum multiplier available is likely to cover the inrush current.
To further explore this, consider the situation in which the upper quartile of the protection range has been selected. The inrush current is now likely to cause a false trip.
Take this example of two motor starter protectors for a 15A rated motor:
- A – setting scale 10; 16A, multiplier of 13
- B – setting scale 14; 20A, multiplier of 13
Motor starter protector B is recommended, as its power loss is lower and it
has a 5A clearance to the top protection setting. Protector A has a 1A clearance.
The power loss of B is about 35% lower than that of A. This is because the latching current of the starter coil is proportionally smaller.
- For A the response value of the short-circuit release is 208A (13A x 16A). With a rated motor current of 15A, the short-circuit release is 13.86 times the setting current (208A/15A = 13.86).
- For B, the response value of the short-circuit release is 260A (13A x 20A). With a rated motor current of 15A, the short-circuit release is 17.33 times the setting current (260A/15A = 17.33).
Because the ratio of inrush current to rated current is substantially increased for B, it is the better choice for an ie3 motor.
As a final word, measurement of the inrush current is highly recommended when critical applications are involved. It removes to a large extent a ‘guesstimation’ element.
The instrumentation involved need not be highly complicated. Clamp-on testers are available that can record the inrush peak.
As ratings increase, some form of soft starting is likely to be used.
On the other hand, when full power has to be close to instantaneously available, and in particular if high inertia loads are involved, a waveform recorder is the best analytical device to determine the motor starter and protection requirements.
-
ADVERTISEMENT
-
ADVERTISEMENT
